Intro
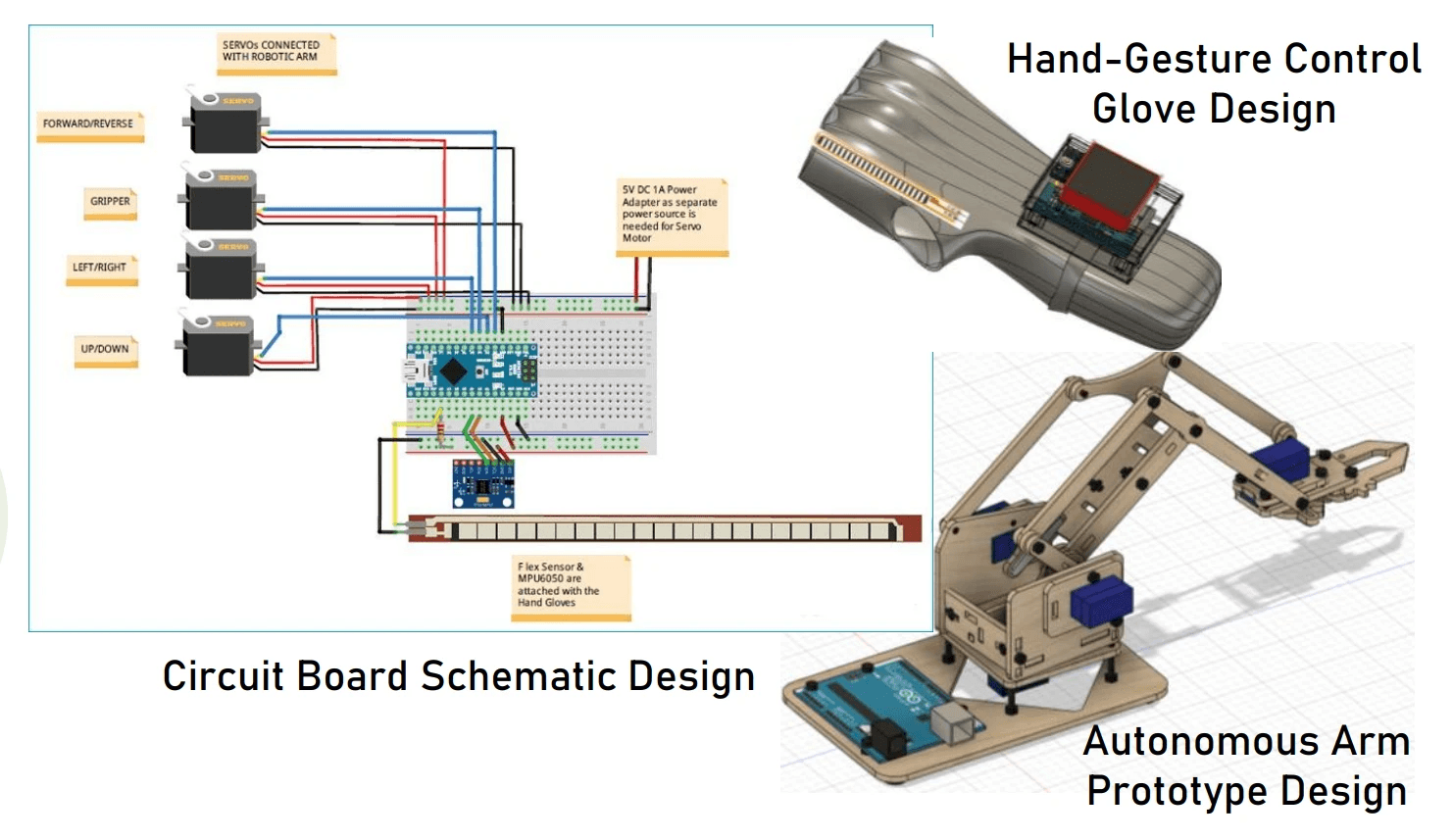
This is Autonomous Arm but you can call it Hand-Gesture Robotic Arm. Like the name implies, it operates with the use of gyroscopic sensor which means it accurately tries to imitates how your hand moves and where it moves. It measure and maintain orientation, to control the movement and stability of the robotic arm, it literally relies on your hand It has significant use in manufacturing, just like how cars were built using automation.
The Problem
These are the problem a gyroscopic controlled robotic arm can solve across different industries and applications:
Dynamic Condition: unpredictable or dynamic environments that are challenging such as rough terrain, turbulent weather or confined spaces.
Precision Handling: There are tasks that requires delicate handling or precise positioning, such as assembly, inspection, or surgery where there is no room for human error.
Safety Concern: The risk of accidents or collisions during situations such as in a factory assembly line or gas refinement could pose significant casualty.
Rate of Efficiencies: manual intervention or task causes higher loss in both time and productive output.
Approach
A gyroscopic controlled robotic arm can solve various problems across different industries and applications, including:
Stability in Unpredictable Environments: Gyroscopic control helps maintain stability and orientation, allowing the robotic arm to operate effectively in unpredictable or dynamic environments.
Precise Manipulation: The gyroscopic control system enables precise control of the robotic arm's movements, allowing it to manipulate objects with accuracy and repeatability.
Increased Efficiency: By providing stable and precise control, gyroscopic technology enhances the efficiency of robotic arm operations which leads to faster task completion times and improved productivity.
Enhanced Safety: The stable orientation and precise movements minimize the likelihood of errors or unexpected movements that could pose a danger to operators or nearby personnel.
Adaptability to Dynamic Conditions: capable of adapting to changing conditions and environments, making them suitable for a wide range of applications which ensures stability and performance.
Results
The outcomes of a gyroscopic controlled robotic arm extend beyond individual tasks and have broader societal benefits:
Increased Productivity: This leads to increased productivity in industries such as manufacturing, logistics, and agriculture, ultimately contributing to economic growth and development.
Safer Work Environments: This creates safer work environments for employees and reduces the burden on healthcare systems by lowering the number of workplace-related injuries.
Improved Quality of Life: These assistive devices enhance independence, autonomy, and quality of life for people with disabilities, allowing them to participate more fully in society.
Environmental Sustainability: By improving efficiency and reducing energy consumption, these robotic systems contribute to environmental sustainability efforts and help mitigate the impact of industrial activities on the environment.
Technological Innovation: These cutting-edge technologies pave the way for new applications, industries, and opportunities, fostering economic growth, job creation, and competitiveness on a global scale.

Conclusion
This project were made as a personal challenge, I would like to do something that I could envision and if it's something that's difficult, the more I crave for it.
Difficulty is an opportunity.
A lot of people don't get it.
Rewards were given to those who took the odds.
Not to those who shy away.
I took it as an excuse to build something cool.
So I did.
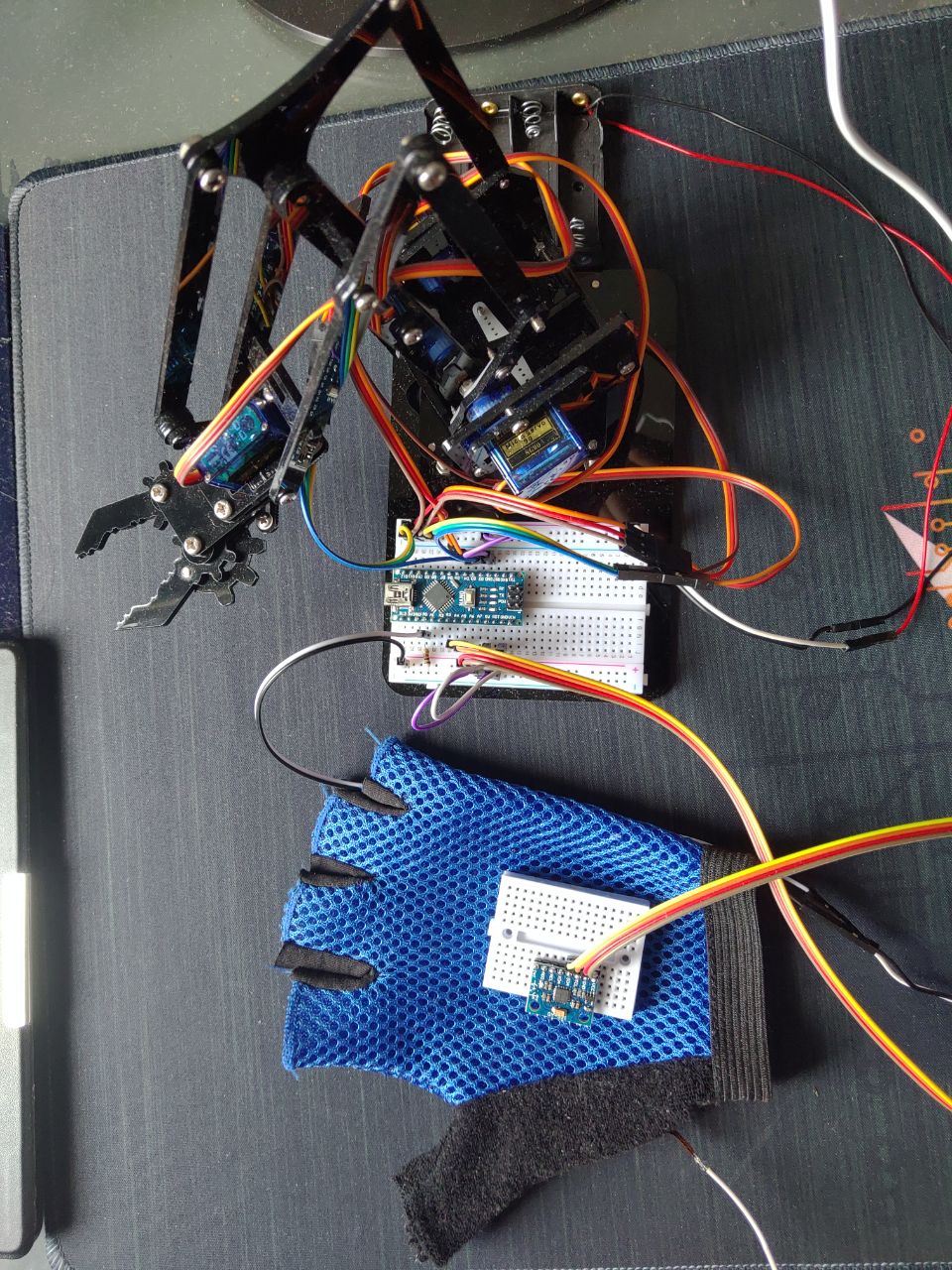
I build a robot that could imitate my hand.
How cool was that?